[PR]
2026年07月15日
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
スラロームによる移動距離近似、その2
2017年04月13日
第2回です。第1回(導入)はこちら。
今回は具体的な数式とかをいじる前に何を求めればよいかとかを整理したいと思います。
実質的に導入その2。
具体的に近似計算とかの話に移る前に、まずはスラロームについておさらいしておきましょう。
基本的には

スラロームとは先ほどの図のような軌跡を描くカーブのことです。
では、私たちがこの軌跡において最も重視しているものは何でしょうか?
それはスラロームによる移動量のはずです。
つまり、スラロームが終わった後に、どの位置にいるかということです。
(壁や柱にぶつからない軌跡を通ることも大事ですが、始点位置と終点位置が合っていれば無茶な軌跡を通ることはないとします。[要出展])
ここで、移動距離の観点で考え、先ほどの図を少し変更しましょう。
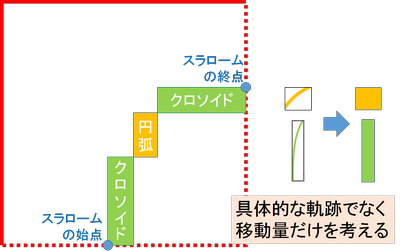
この図より、クロソイドと円弧のそれぞれの縦横方向の移動距離(それぞれの長方形の縦横の長さ)がわかれば、スラローム全体で移動する距離を表すことができそうです。
つまり、これらとスラロームパラメータとの対応を求めれば、始点と終点を決めればスラロームパラメータを決めることができます。
具体的に移動距離を求める前に、スラロームに必要なパラメータについて考えておきましょう。
スラロームをするためには、角速度が以下の図のように変化する必要がありました。
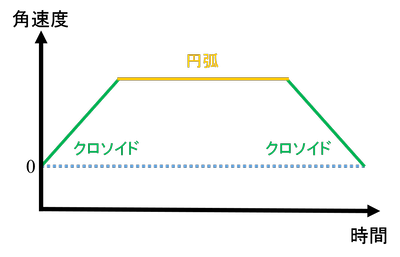
このグラフを描くために必要な情報が、スラロームを行うために必要なパラメータになります。
それを図中に書き入れたものが下図になります。
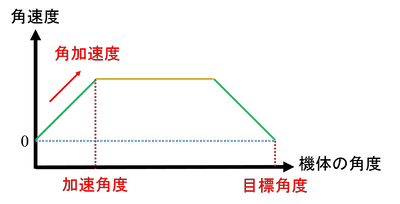
※この図では、パラメータとしての取り扱いの関係から横軸を時間から機体の角度に変更しています。
図中に赤字で示した
目標角度(何度のターンをするのか)
加速角度(何度まで角加速するのか)
角加速度
がわかれば、図のような台形加速を行うことが可能なはずです。(最大角速度は角加速度と加速角度より求めることができるので、パラメータとしては選択しないことにします。)
そして、これらに機体の重心速度を加えたものがスラロームに必要なパラメータとなります。
※前距離、後距離と呼ばれるスラローム前後のオフセットについては連載後半で触れます。
やりたいこと
「始点と終点の位置からスラロームパラメータを求める」
そのために必要なこと
「円弧とクロソイドによる移動距離が、スラロームパラメータによってどのように表されるか知る」
スラロームパラメータって?
「目標角度、加速角度、角加速度、重心速度」
次回は移動距離を求めていきます。ついに数式が登場!…のはず。
今回は具体的な数式とかをいじる前に何を求めればよいかとかを整理したいと思います。
実質的に導入その2。
パラメータを決めるために必要なもの
スラロームについてのおさらい
具体的に近似計算とかの話に移る前に、まずはスラロームについておさらいしておきましょう。
基本的には
クロソイド曲線 ⇒ 円弧 ⇒ クロソイド曲線
でした。
忘れてる方やそもそもスラローム知らないとかいう人は、昔書いた記事読んでください(宣伝)。スラロームの軌跡の中で重要な要素
スラロームとは先ほどの図のような軌跡を描くカーブのことです。
では、私たちがこの軌跡において最も重視しているものは何でしょうか?
それはスラロームによる移動量のはずです。
つまり、スラロームが終わった後に、どの位置にいるかということです。
(壁や柱にぶつからない軌跡を通ることも大事ですが、始点位置と終点位置が合っていれば無茶な軌跡を通ることはないとします。[要出展])
ここで、移動距離の観点で考え、先ほどの図を少し変更しましょう。
この図より、クロソイドと円弧のそれぞれの縦横方向の移動距離(それぞれの長方形の縦横の長さ)がわかれば、スラローム全体で移動する距離を表すことができそうです。
つまり、これらとスラロームパラメータとの対応を求めれば、始点と終点を決めればスラロームパラメータを決めることができます。
スラロームに必要なパラメータは?
具体的に移動距離を求める前に、スラロームに必要なパラメータについて考えておきましょう。
スラロームをするためには、角速度が以下の図のように変化する必要がありました。
このグラフを描くために必要な情報が、スラロームを行うために必要なパラメータになります。
それを図中に書き入れたものが下図になります。
※この図では、パラメータとしての取り扱いの関係から横軸を時間から機体の角度に変更しています。
図中に赤字で示した
目標角度(何度のターンをするのか)
加速角度(何度まで角加速するのか)
角加速度
がわかれば、図のような台形加速を行うことが可能なはずです。(最大角速度は角加速度と加速角度より求めることができるので、パラメータとしては選択しないことにします。)
そして、これらに機体の重心速度を加えたものがスラロームに必要なパラメータとなります。
※前距離、後距離と呼ばれるスラローム前後のオフセットについては連載後半で触れます。
まとめ
やりたいこと
「始点と終点の位置からスラロームパラメータを求める」
そのために必要なこと
「円弧とクロソイドによる移動距離が、スラロームパラメータによってどのように表されるか知る」
スラロームパラメータって?
「目標角度、加速角度、角加速度、重心速度」
次回は移動距離を求めていきます。ついに数式が登場!…のはず。
PR
Comment