[PR]
2026年07月03日
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
マイクロマウス調整法(フレッシュマン向け)
2017年10月25日
こんにちは、鯉です。
地区大会も残すところ中部だけとなり、あとは全日本に向けて仕上げていく時期となってまいりました。
今年は割と多くの地区大会に参加しましたが、フレッシュマンを見ていると「大会会場でどうやって壁センサの値がずれているかを把握し、どのように直すか」といった調整法が確立されていないような気がしました。
たしかにネットで検索しても調整方法については記事がほとんど見つからず、ノウハウの塊状態になっているような。。。
というわけで、僕が行っている調整法を紹介しようかと思います!
フレッシュマンの方もそうでない方も参考にしていただければ幸いです。
※今回の記事は個人の主義主張が強く含まれます。調整方法がコレで正解というわけではないので、あくまで1意見としてお聞きください。
俺はこんな方法でやってるぜ! といったご意見ご感想お待ちしております。
まずは、壁制御の調整方法について紹介していきます。
鯉住では、部室や部屋などの普段の調整はもちろん、大会会場でもセンサ値がずれていると感じたら行うようにしています。
壁制御のやり方などは割愛し、すでにできているものとして進めます。
不安な方は、MiceWikiやうむ夫の歩みや関西支部やTokoro's Tech-Noteなど挙げればきりがないのでお好きなのを参考にしてください。
その0.迷路に線を引く
まず初めに、迷路に調整用の線を引きましょう!!
大会ではできませんが、個人または団体で迷路を保有しているならば真っ先に行いましょう!
調整のやりやすさが段違いです。
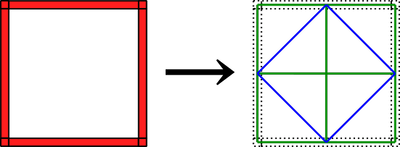
引くべき線はこんな感じです。
各区画にこんな感じで線を引きましょう。
青い線は斜めの調整用なので、(普通は)斜めをやらないフレッシュマンは関係ないですが、いつやりたくなるかわからないですしこの機会に引いておきましょう。
ちなみに実際の迷路は下板が黒色なので、白く見える鉛筆や修正液とかで引くといいかと思います。Miceでは鉛筆で引いています。
その1.片壁制御
さて、調整に移っていきましょう。
まずは左右それぞれの片壁制御を行い、制御がきちんとかかっているか、センサのリファレンス値はあっているかを確かめます。
片壁制御で見るべきこと
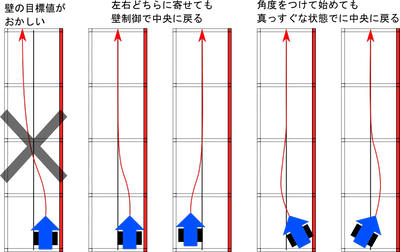
見るべきことをポンチ絵にしてみました。
だいたい図を見てもらえばわかると思います。
個人的な感覚としては
・姿勢は1区間くらいで正しい状態に直せるくらい
・制御が発散してブルブル震えながら走るのはよくない
・離れる制御も近づく制御もかける
・センサ値なんてものは大会毎にずれると思って調整する
くらいのことに気をつけておけばいいかと。
その2.壁の切れ目
晴れて片壁制御がかかるようになったら、次は壁の切れ目も見てみましょう。
壁の切れ目とは壁がなくなったタイミングで、マウスは壁が遠ざかったと認識し制御によって吸い込まれる現象です。
詳しくはMiceWikiをご参照ください。

この調整の目安は図の通り、少し吸い込まれても次の区画や柱で中心に戻る程度を目指すと良いでしょう(フレッシュマンは)。
僕は大会ではこの調整は行わないことが多いです。
部室なりでしっかり調整し、大会会場では片壁制御の調整法を行えば切れ目も大丈夫でしょう。
その3.まとめ
自分なりの壁制御の調整方法をまとめました。
普段の調整環境で、その0~その2を行い、大会会場ではその1だけチェックすれば充分だと思います。
ただし、迷路をきちんと走るのが絶対的に重要なので今回の調整方法で上手くあっていても迷路を走らせたときにずれるようなら適宜修正していきましょう!
次にスラロームの調整方法に移っていきます。
壁制御と同じく、スラロームの実装はできているとして進めます。
わからない方、不安な方は以前書いた記事(原理)やツルマインのブログ(実装)やMiceWiki(実装および調整)とかを見てください。
(意外とスラローム自体についての記事って少ないんですね)
その0.距離があっているか確認する
実際にスラロームの調整に入る前にやることがいくつかあります。
まず最初にマウスが考えている距離が実際の距離と一致しているかを確かめましょう。
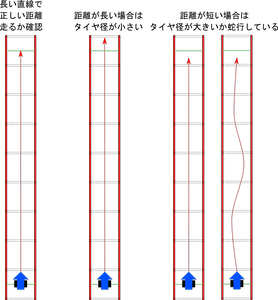
距離の調整は、ズレが大きく出るようにできるだけ長い直線を用意し、きちんと直進するように両壁を入れて壁制御をかけて、走行距離を見ます。
MiceWikiのこの辺の考え方を取り入れ、距離を各時刻の速度の積分として求めているならば、タイヤ径がパラメータとなります。
実際に走らせたとき、距離が合うようにタイヤ径を設定しましょう。
また、注意すべき点として、距離が短くなった際に壁制御が甘く蛇行したことが原因の場合があります。
そのため、壁制御の調整をしてから行うほうが良いでしょう。
目で見て明らかに蛇行していなければ大丈夫です。
その1.角度があっているか確認する
次は角度を見ていきましょう。
超信地旋回を行って、目標の角度と一致するかを確認します。

僕は角度のずれが大きく出るように3600°くらい超信地旋回してます。
もし、角度がずれるようなら、ジャイロを使っている人はジャイロの定数が、ジャイロ使ってない人はマウスの幅がズレているのかもしれません。
3600°回してもパッと見でズレがわからない程度にしたいところです。
その2.スラロームの角度調整
ようやくスラロームの調整です。
まずはスラロームで指定した角度きちんと曲がれているか確認しましょう。
この確認方法は人によってやり方が大きく異なるところですが、僕は1回だけ曲がって角度を見ます。

調整は
直進(1.5区画くらい) → スラローム → 長い直進(2区画以上)
という組み合わせで行っています。
図に書いてありますが、
最初の直進では位置と角度を合わせるので、それができる長さにしましょう。
また速度についても、止まった状態からスラロームの速度まで加速し安定できる距離にしておきましょう。
最後の直進は、角度のずれを見るためなので、壁制御等がかかり角度が直ってしまわないよう注意しましょう。
この結果、もし角度がズレているようであれば、スラロームの目標角度を合うように変えることで調整します。(例えば、目標角度90°で曲がりすぎるようなら89°にするなど)
その3.スラロームの位置調整
スラロームの調整もこれで最後です。
ここまでで、角度はあったので、スラローム後の位置が目標の位置になるように調整しましょう。

ここまでですでに重々承知とは思いますが、スラロームも実際にやるとシミュレーターや理論値とは微妙に異なります。
この位置のずれは前距離と後距離をいい感じに合うように調整してあげましょう。
前距離と後距離ってなに?って方はこちら。
その4.まとめとスラローム耐久テスト
スラロームの調整については以上になります。
こちらも壁制御と同様迷路で走るパラメータが正義なのを忘れないでください。
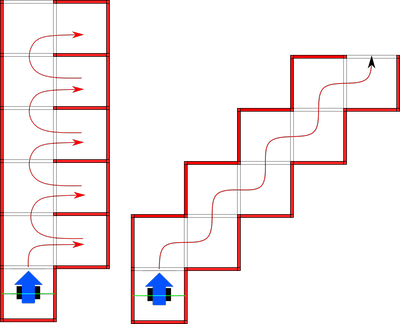
最後にスラロームのチェックとしてよく用いられる耐久テストパターンを紹介してスラロームの調整方法を締めさせていただきます。
おわりに
壁制御とスラロームの調整方法について紹介しました。
今回のことをしっかりと行うだけでフレッシュマンなら、まずこけなくなるのではないでしょうか?
しかし、実際に迷路を走らせるとどうもうまくいかないということもあり得ます。
そういう時には前壁制御などの他の補正も入れてみる必要があるかもしれません。
最後に、繰り返しになりますが今回の方法は決して正解というわけではなく、あくまで僕個人の方法です。
皆さま各々違う調整方法を持っておられると思いますが、もし参考になれば幸いです。
また、違う方法があれば教えていただけると嬉しいです。
それでは良き調整ライフを!
地区大会も残すところ中部だけとなり、あとは全日本に向けて仕上げていく時期となってまいりました。
今年は割と多くの地区大会に参加しましたが、フレッシュマンを見ていると「大会会場でどうやって壁センサの値がずれているかを把握し、どのように直すか」といった調整法が確立されていないような気がしました。
たしかにネットで検索しても調整方法については記事がほとんど見つからず、ノウハウの塊状態になっているような。。。
というわけで、僕が行っている調整法を紹介しようかと思います!
フレッシュマンの方もそうでない方も参考にしていただければ幸いです。
※今回の記事は個人の主義主張が強く含まれます。調整方法がコレで正解というわけではないので、あくまで1意見としてお聞きください。
俺はこんな方法でやってるぜ! といったご意見ご感想お待ちしております。
壁制御の調整方法
まずは、壁制御の調整方法について紹介していきます。
鯉住では、部室や部屋などの普段の調整はもちろん、大会会場でもセンサ値がずれていると感じたら行うようにしています。
壁制御のやり方などは割愛し、すでにできているものとして進めます。
不安な方は、MiceWikiやうむ夫の歩みや関西支部やTokoro's Tech-Noteなど挙げればきりがないのでお好きなのを参考にしてください。
その0.迷路に線を引く
まず初めに、迷路に調整用の線を引きましょう!!
大会ではできませんが、個人または団体で迷路を保有しているならば真っ先に行いましょう!
調整のやりやすさが段違いです。
引くべき線はこんな感じです。
各区画にこんな感じで線を引きましょう。
青い線は斜めの調整用なので、(普通は)斜めをやらないフレッシュマンは関係ないですが、いつやりたくなるかわからないですしこの機会に引いておきましょう。
ちなみに実際の迷路は下板が黒色なので、白く見える鉛筆や修正液とかで引くといいかと思います。Miceでは鉛筆で引いています。
その1.片壁制御
さて、調整に移っていきましょう。
まずは左右それぞれの片壁制御を行い、制御がきちんとかかっているか、センサのリファレンス値はあっているかを確かめます。
片壁制御で見るべきこと
見るべきことをポンチ絵にしてみました。
だいたい図を見てもらえばわかると思います。
個人的な感覚としては
・姿勢は1区間くらいで正しい状態に直せるくらい
・制御が発散してブルブル震えながら走るのはよくない
・離れる制御も近づく制御もかける
・センサ値なんてものは大会毎にずれると思って調整する
くらいのことに気をつけておけばいいかと。
その2.壁の切れ目
晴れて片壁制御がかかるようになったら、次は壁の切れ目も見てみましょう。
壁の切れ目とは壁がなくなったタイミングで、マウスは壁が遠ざかったと認識し制御によって吸い込まれる現象です。
詳しくはMiceWikiをご参照ください。
この調整の目安は図の通り、少し吸い込まれても次の区画や柱で中心に戻る程度を目指すと良いでしょう(フレッシュマンは)。
僕は大会ではこの調整は行わないことが多いです。
部室なりでしっかり調整し、大会会場では片壁制御の調整法を行えば切れ目も大丈夫でしょう。
その3.まとめ
自分なりの壁制御の調整方法をまとめました。
普段の調整環境で、その0~その2を行い、大会会場ではその1だけチェックすれば充分だと思います。
ただし、迷路をきちんと走るのが絶対的に重要なので今回の調整方法で上手くあっていても迷路を走らせたときにずれるようなら適宜修正していきましょう!
スラロームの調整方法
次にスラロームの調整方法に移っていきます。
壁制御と同じく、スラロームの実装はできているとして進めます。
わからない方、不安な方は以前書いた記事(原理)やツルマインのブログ(実装)やMiceWiki(実装および調整)とかを見てください。
(意外とスラローム自体についての記事って少ないんですね)
その0.距離があっているか確認する
実際にスラロームの調整に入る前にやることがいくつかあります。
まず最初にマウスが考えている距離が実際の距離と一致しているかを確かめましょう。
距離の調整は、ズレが大きく出るようにできるだけ長い直線を用意し、きちんと直進するように両壁を入れて壁制御をかけて、走行距離を見ます。
MiceWikiのこの辺の考え方を取り入れ、距離を各時刻の速度の積分として求めているならば、タイヤ径がパラメータとなります。
実際に走らせたとき、距離が合うようにタイヤ径を設定しましょう。
また、注意すべき点として、距離が短くなった際に壁制御が甘く蛇行したことが原因の場合があります。
そのため、壁制御の調整をしてから行うほうが良いでしょう。
目で見て明らかに蛇行していなければ大丈夫です。
その1.角度があっているか確認する
次は角度を見ていきましょう。
超信地旋回を行って、目標の角度と一致するかを確認します。
僕は角度のずれが大きく出るように3600°くらい超信地旋回してます。
もし、角度がずれるようなら、ジャイロを使っている人はジャイロの定数が、ジャイロ使ってない人はマウスの幅がズレているのかもしれません。
3600°回してもパッと見でズレがわからない程度にしたいところです。
その2.スラロームの角度調整
ようやくスラロームの調整です。
まずはスラロームで指定した角度きちんと曲がれているか確認しましょう。
この確認方法は人によってやり方が大きく異なるところですが、僕は1回だけ曲がって角度を見ます。
調整は
直進(1.5区画くらい) → スラローム → 長い直進(2区画以上)
という組み合わせで行っています。
図に書いてありますが、
最初の直進では位置と角度を合わせるので、それができる長さにしましょう。
また速度についても、止まった状態からスラロームの速度まで加速し安定できる距離にしておきましょう。
最後の直進は、角度のずれを見るためなので、壁制御等がかかり角度が直ってしまわないよう注意しましょう。
この結果、もし角度がズレているようであれば、スラロームの目標角度を合うように変えることで調整します。(例えば、目標角度90°で曲がりすぎるようなら89°にするなど)
その3.スラロームの位置調整
スラロームの調整もこれで最後です。
ここまでで、角度はあったので、スラローム後の位置が目標の位置になるように調整しましょう。
ここまでですでに重々承知とは思いますが、スラロームも実際にやるとシミュレーターや理論値とは微妙に異なります。
この位置のずれは前距離と後距離をいい感じに合うように調整してあげましょう。
前距離と後距離ってなに?って方はこちら。
その4.まとめとスラローム耐久テスト
スラロームの調整については以上になります。
こちらも壁制御と同様迷路で走るパラメータが正義なのを忘れないでください。
最後にスラロームのチェックとしてよく用いられる耐久テストパターンを紹介してスラロームの調整方法を締めさせていただきます。
おわりに
壁制御とスラロームの調整方法について紹介しました。
今回のことをしっかりと行うだけでフレッシュマンなら、まずこけなくなるのではないでしょうか?
しかし、実際に迷路を走らせるとどうもうまくいかないということもあり得ます。
そういう時には前壁制御などの他の補正も入れてみる必要があるかもしれません。
最後に、繰り返しになりますが今回の方法は決して正解というわけではなく、あくまで僕個人の方法です。
皆さま各々違う調整方法を持っておられると思いますが、もし参考になれば幸いです。
また、違う方法があれば教えていただけると嬉しいです。
それでは良き調整ライフを!
PR
Comment